This work evaluates the feasibility of a proposed ultrasound-based surgical navigation system for percutaneous renal intervention via in vivo measurements and in vitro assessment. The system integrates preoperative computer tomography (CT) planning with intraoperative ultrasonography (US) by means of a proposed semi-automatic US to CT rigid registration. The interventional procedure is performed with a visualized guidance interface. The navigation system is evaluated at two levels. Level I evaluation comprises measurements of the accuracy, precision, and processing time of our system on in vivo data provided by volunteers. For Level II, expert urologists are asked to rate the perceptual quality of the system via in vitro tests on a kidney phantom. Both objective and subjective evaluations validate the proposed surgical navigation system.
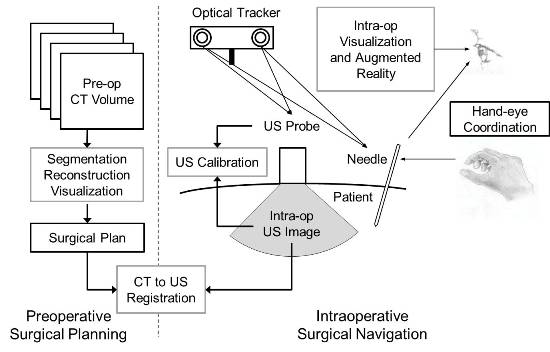
Figure 1. Overview of the proposed surgical navigation system.